

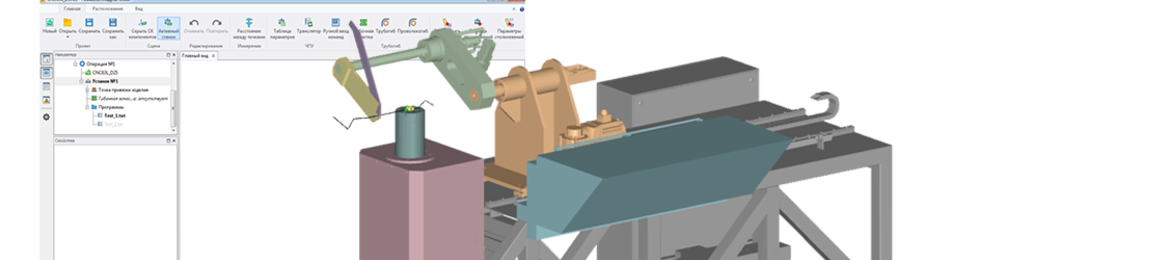
ГеММа-3D.Проволокогиб — конфигурация системы ГеММа-3D.Верификатор, предназначена для эмуляции работы линейки современных гибочных станков с ЧПУ, применяемого для автоматической гибки проволоки различного сечения. Основными задачами системы является подготовка управляющей программы гиба и её редактирование, контроль выполнения последовательности управляющих программ гибки и проверка возможных столкновений проволоки с подвижными и неподвижными компонентами станка и элементами оснастки.


Функциональные возможности:
- создание и компоновка цифрового двойника оборудования с ЧПУ с моделированием его основных компонентов и заданием их кинематики;
- создание геометрических моделей приспособлений и заготовок из геометрических примитивов;
- размещение рабочей системы координат заготовки и оснастки, геометрических моделей приспособления, заготовки и изделия (целевая геометрия) в рабочем пространстве оборудования в соответствии с технологическим процессом, с помощью инструментов для преобразования;
- задание индивидуальных параметров для оснастки, имеющей несколько рабочих уровней;
- загрузка, создание и редактирование УП для используемого оборудования;
- подготовка и верификация УП для работы с многоуровневой оснасткой;
- имитация движения элементов оборудования и оснастки в соответствии с командами УП;
- имитация движения и изменение формы трубы или проволоки в соответствие с командами УП;
- экспорт полуфабриката, полученного в результате гиба в формат STL;
- контроль столкновений подвижных элементов оборудования и оснастки с его неподвижными элементами или заготовкой;
- контроль отклонений модели полуфабриката от целевой геометрии изделия при помощи инструментов сравнения;
- подготовка технологических карт и эскизов в формате HTML;
- вывод параметров станка в табличном формате «xml» для предварительной отладки и настройки оборудования.